Space
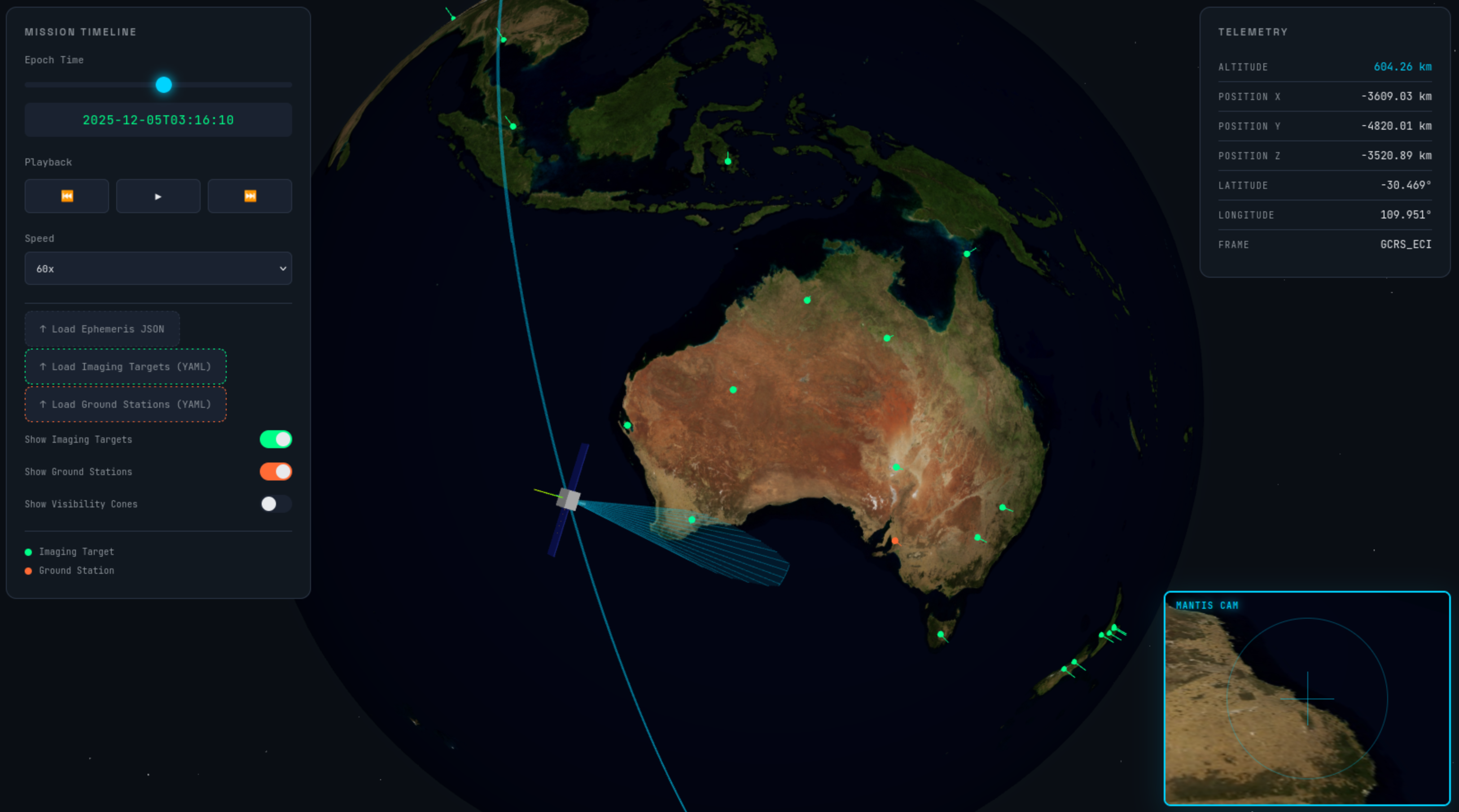
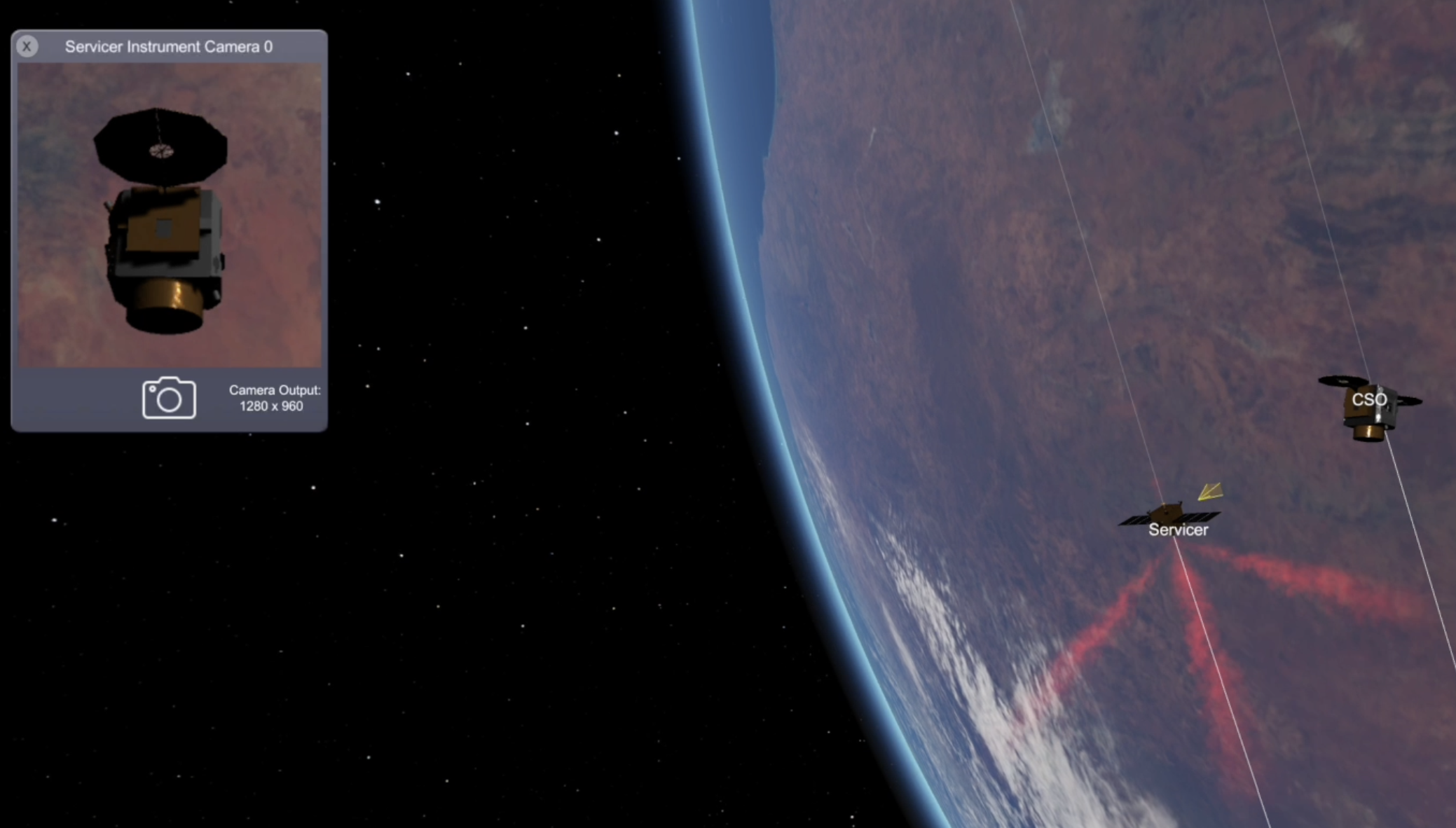
Scarlet-β: Satellite Mission Autonomy
Developed mission-level autonomy for a self- and Earth-inspection payload on the Buccaneer Main Mission cubesat. Successfully integrated with orbiting satellite and secured $450k continuation funding.
View Details