Energy-Aware Planning
Efficient and safe path planning over rough terrains using terrain-dependent energy cost models and sampling-based planning techniques for long-duration autonomous missions on wheeled mobile robots.
The Energy Challenge
Agricultural properties are vast, often encompassing large areas of undulating off-road terrain with varying traction conditions. For autonomous wheeled mobile robots operating in these environments, careful consideration and management of energy resources is essential when planning missions—traversing large distances and achieving objectives without stranding the platform in the field.
This research addresses the motion planning problem for wheeled mobile robots on undulating off-road terrains, developing a hierarchical planning strategy that leverages sampling-based techniques to generate energy-efficient mission plans.
Energy Cost of Motion Model
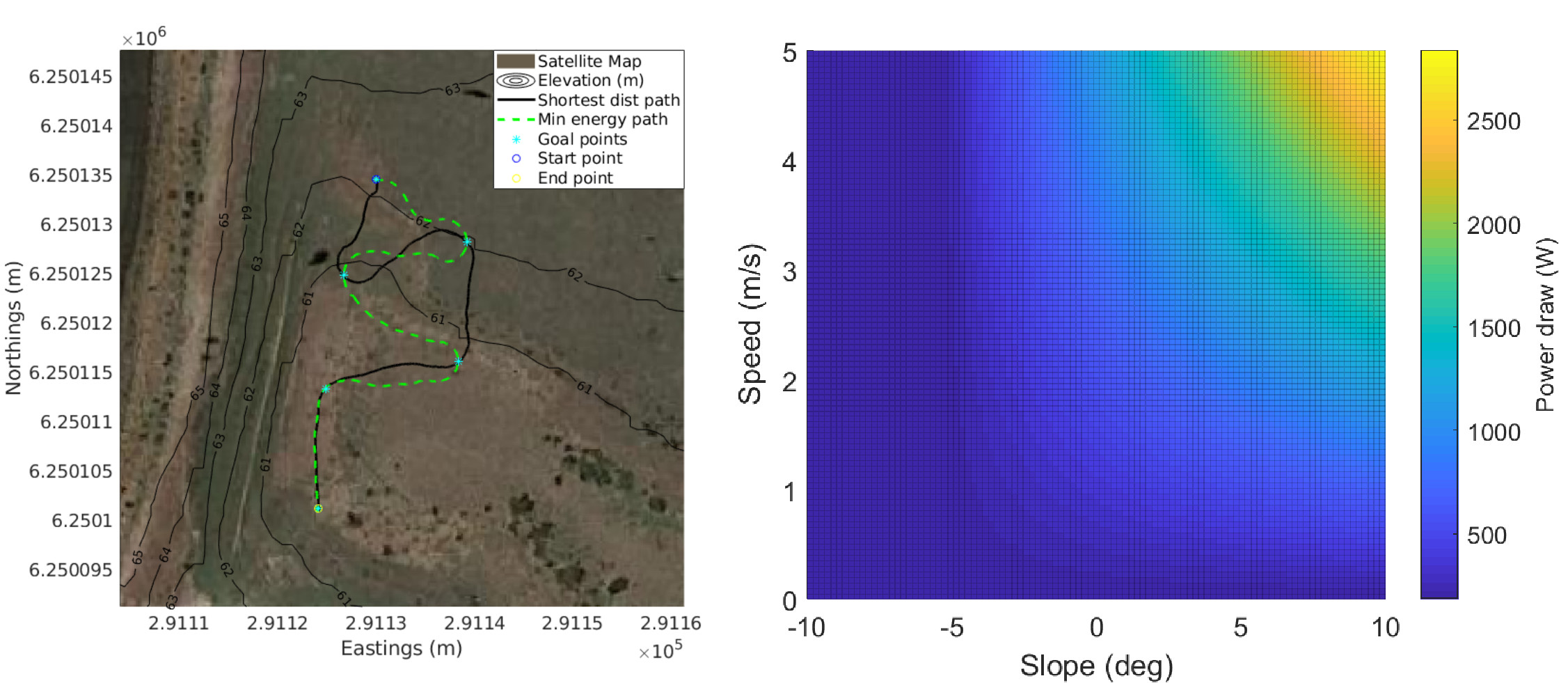
A foundational contribution is the development of a data-driven energy cost of motion (ECM) model for omnidirectional wheeled mobile robots. The model captures the relationship between energy consumption and key factors:
- Terrain Slope — Power draw increases significantly when climbing grades, with the relationship being approximately linear with slope angle for moderate inclines
- Vehicle Speed — Higher speeds require more power, but complete the mission faster; the optimal trade-off depends on the specific terrain profile
- Platform Configuration — The robot's mass and drivetrain characteristics affect baseline power consumption
- Surface Type — Different terrain surfaces (grass, gravel, sealed) exhibit different rolling resistance characteristics
The model was calibrated using extensive field trial data collected during autonomous surveys at agricultural sites, with the resulting predictions achieving accuracy within 1–5% of measured energy consumption.
Hierarchical Planning Pipeline
The energy-efficient path planning approach involves a multi-stage pipeline:
1. Environment and Task Specification
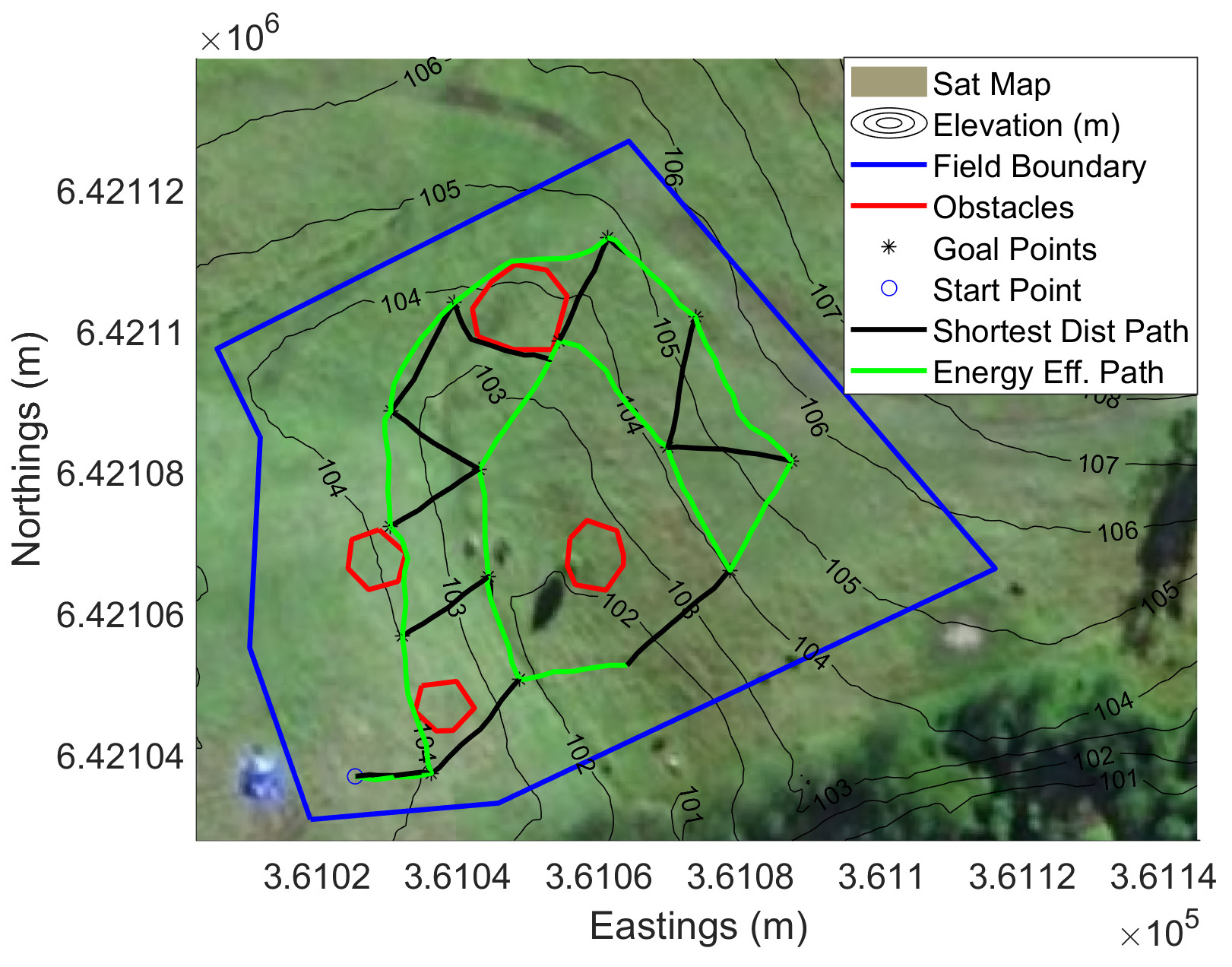
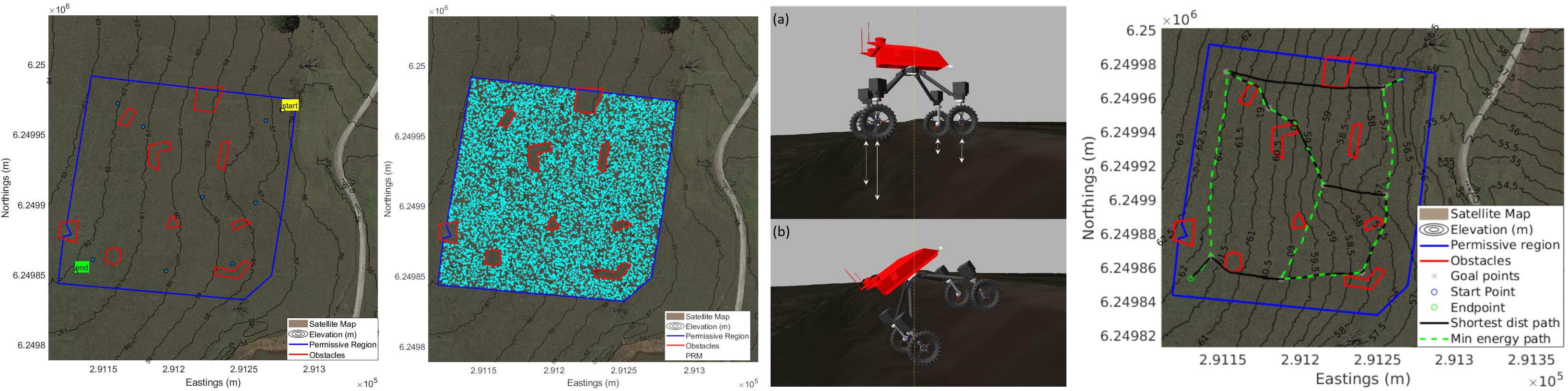
A georeferenced digital elevation map (DEM) provides terrain topology, while permissive and restrictive regions define traversable space. Mission goals are specified as a set of locations the robot must visit.
2. Roadmap Generation
Using the Probabilistic Roadmap (PRM) method, the continuous state space is discretised through random sampling. Two sampling strategies were developed:
- Point-based Sampling — A simplified approach using a disc collision model and holonomic motion assumptions. Fast to compute and allows dense environment coverage, but produces somewhat jagged paths.
- Kinematic Pose Sampling — Full pose-kinematic configuration sampling that considers platform stability and connects poses via clothoid curves. Produces smooth, Ackermann-feasible paths at higher computational cost.
3. Task Graph Generation
A compact goal connectivity graph encodes the minimum-cost paths between each pair of goal locations. Dijkstra's algorithm queries the roadmap to find these optimal inter-goal paths, with costs determined by either Euclidean distance (baseline) or the ECM model (energy-aware).
4. Tour Optimisation
The mission is modelled as an Asymmetric Travelling Salesman Problem (ATSP), accounting for the fact that traversal costs between locations are direction-dependent on undulating terrain (climbing vs descending). The ATSP solution yields the minimum-cost ordering of goal visits.
Clothoid-Based Path Connection
For kinematic sampling, poses are connected using clothoid curves—curves with linearly varying curvature. This enables:
- Smooth transitions between poses of different orientations
- Paths feasible for Ackermann-steered vehicles
- Enforcement of curvature constraints based on platform kinematic limits
The Clothoid Hermite G1 interpolation problem is solved efficiently using the method of Bertolazzi and Frego, finding the shortest clothoid segment connecting two poses with specified positions and headings.
Field Validation
Ten field tests across two agricultural sites validated the planning approach. Energy-aware plans were observed to:
- Follow terrain level curves to minimise elevation changes
- Reduce predicted mission energy cost by up to 4% compared to shortest-distance planning
- Demonstrate ECM prediction accuracy within 1–5% of measured consumption
The methodology proved particularly effective on terrain with steeper grades, where the energy savings from intelligent path selection become more pronounced.
The Orienteering Problem with Replenishment
Beyond standard path planning, this research also introduced a novel problem formulation: the Orienteering Problem with Replenishment (OPR). This extends classical orienteering to scenarios where robots can recharge at designated locations, enabling longer missions that would otherwise exceed battery capacity.
The OPR formulation has applications in agricultural monitoring where charging stations can be strategically placed, allowing robots to cover larger areas through multi-leg missions with intermediate recharging.

Impact and Applications
The energy-aware planning framework developed in this work enables autonomous robots to operate more efficiently in resource-constrained environments. Key applications include:
- Extended-duration agricultural surveys and monitoring
- Autonomous fence and infrastructure inspection
- Soil sampling and weed detection missions
- Water level and pasture monitoring
This research complements the slip-compensating trajectory tracking work, together forming a complete autonomy stack from high-level mission planning down to low-level motion control for off-road wheeled mobile robots.