Slip-Compensating Trajectory Tracking
Novel receding horizon estimation and control strategies with structured noise blocking for accurate trajectory tracking of wheeled mobile robots operating in challenging off-road environments where wheel slip is prevalent.

The Challenge of Wheel Slip
In off-road environments—farm paddocks, forest trails, construction sites—wheel slip is unavoidable. Loose soil, grass, mud, and slopes all cause wheels to slip, making the robot's actual motion differ significantly from commanded motion. Without compensation, robots veer off course, waste energy, and can become stuck.
For agricultural applications where robots operate in close proximity to crops and livestock, accurate navigation is paramount. Achieving this in the presence of difficult off-road conditions presents a major challenge that this research directly addresses.

Receding Horizon Estimation and Control
The RHEC framework combines two discrete optimisation stages: estimation and control. A receding horizon estimation (RHE) problem is solved first, minimising state error over a past horizon conditioned on measurements and a parametric dynamics model. The resulting state and parameter estimates then initialise the receding horizon control (RHC) problem, which computes optimal control inputs minimising deviation from a reference trajectory over a forward prediction horizon.
This combined approach yields an adaptive, real-time control strategy capable of adjusting to environmental changes on-the-fly—a critical property for off-road autonomy where terrain conditions vary continuously.
Structured Blocking Innovation
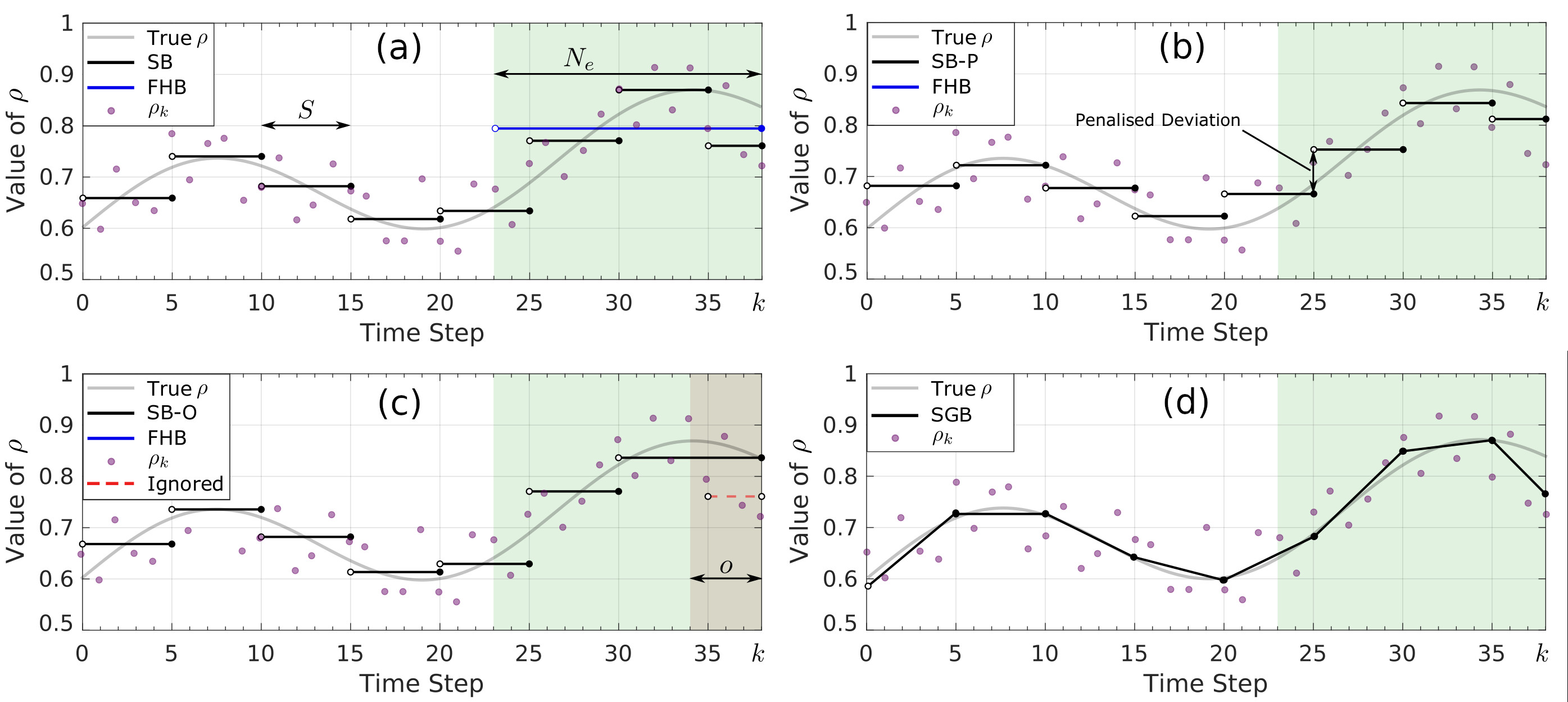
The key contribution of this work is the development of structured blocking (SB) extensions for the estimation component. Standard RHEC approaches struggle with rapidly-varying process noise sequences—such as the slip parameters experienced during off-road traversal. The novel SB methodology addresses this by:
- Structured Value Blocking (SB) — Constraining groups of adjacent-in-time parameter estimates to share the same value, transforming the process noise sequence into a piecewise constant function. This reduces computational complexity while improving noise rejection.
- Structured Gradient Blocking (SGB) — Applying blocking to the first-derivative rather than the values themselves, yielding piecewise linear approximations that better capture the continuous nature of slip variations.
- Block Overlapping (SB-O, SGB-O) — Virtually extending the penultimate block to overlap insufficiently-sized terminal blocks, ensuring reliable parameter estimates for forward prediction.
- Value-shift Penalisation (SB-P, SGB-P) — Introducing virtual measurements that penalise large deviations between consecutive blocks, effectively smoothing the parameter sequence.
Implementation on Swagbot
The RHEC system was implemented on the ACFR Swagbot platform—an omnidirectional electric ground robot designed for grazing livestock farms. The system architecture integrates:
- GNSS position measurements at 50Hz
- AHRS attitude and heading at 20Hz
- Joint encoder data at 100Hz
- Real-time optimisation using the ACADO toolkit with qpOASES solver
The implementation uses horizon lengths of 15 timesteps at 0.2s intervals, with steering angle constraints of ±45° and steering rate constraints of ±45°/s. The motion model employed is an extended bicycle kinematic model augmented with longitudinal slip (κ) and lateral slip (μ) parameters.
Experimental Validation
Extensive validation was conducted through both 2D kinematic simulations and physical field trials at the University of Sydney test site. The experiments assessed performance across varying terrain conditions including grass, gravel, and sloped ground.
Key findings include:
- The SB-OP (structured blocking with overlapping and penalties) variant demonstrated significant improvements in trajectory tracking accuracy compared to full horizon blocking approaches
- Improved slip parameter estimation directly translated to better path following performance
- The methods maintained real-time execution at speeds up to 2.5 m/s during field trials
- Tracking RMSE reductions of up to 30% were observed in challenging slip conditions
Impact and Applications
The slip-compensating RHEC framework developed in this work provides a foundation for accurate autonomous navigation in challenging off-road environments. The methodology has applications across:
- Agricultural robotics for crop and livestock monitoring
- Mining operations in unstructured terrain
- Planetary exploration rovers
- Emergency response
This work forms part of the broader PhD thesis "Energy-aware Planning and Control of Off-road Wheeled Mobile Robots" and connects directly to the energy-aware path planning research that addresses efficient navigation at the mission planning level.