Scarlet-β: Satellite Mission Autonomy
Developing mission-level autonomy for a self- and Earth-inspection payload on the Defence Science Technology Group's Buccaneer Main Mission cubesat, enabling intelligent scheduling of imaging operations based on predicted ground-site visibility.
The Challenge
As missions continue to grow in scope and complexity, there is an increasing need for constraint-aware autonomy in satellite operations. This is particularly relevant for agile Earth-observation satellites, where judicious management of resources over the mission horizon is essential to ensure the best quality imagery can be captured and downlinked.
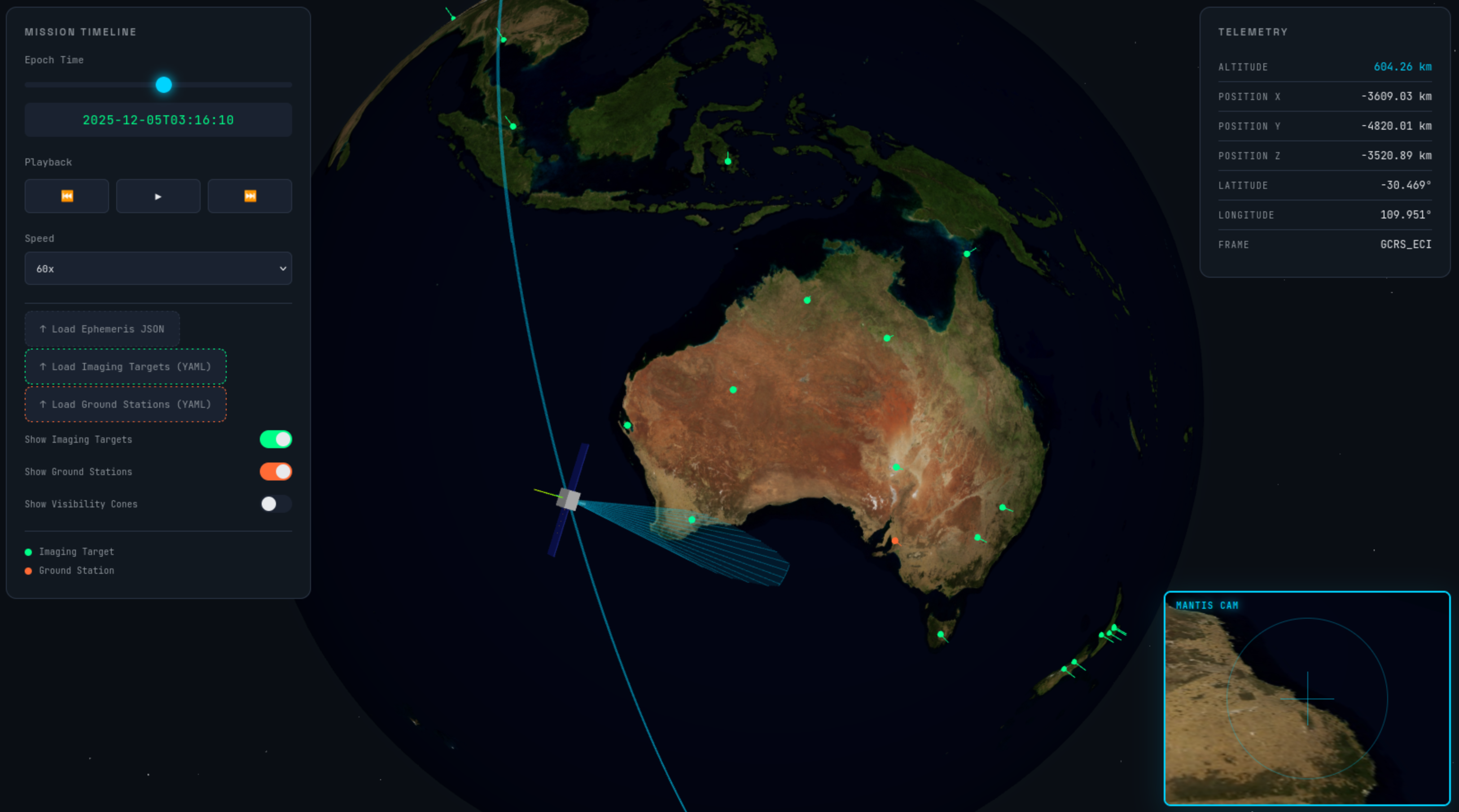
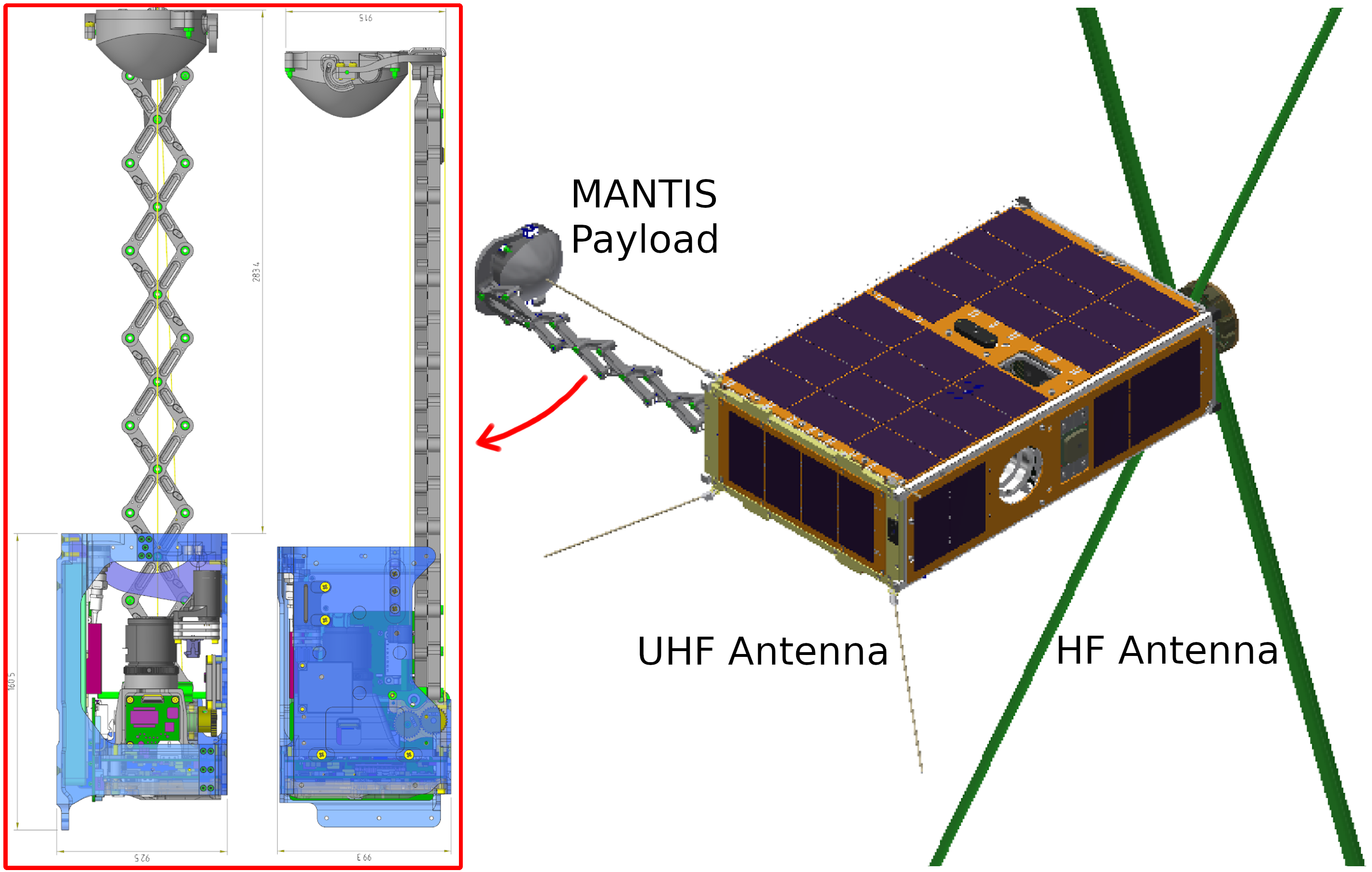
Such satellites are limited by factors such as communications bandwidth, availability and latency, on-board energy and data storage limits, and dynamic constraints on the satellite's motion and mobility. The Buccaneer Main Mission, equipped with the Maneuverable Antenna and Terrestrial Imaging System (MANTIS) payload for self- and Earth-inspection, needed autonomous decision-making to maximise its scientific return within these constraints.
The challenge was to develop an autonomous mission planner that could intelligently schedule imaging operations, balancing these competing objectives without human intervention.
My Contribution
I led the R&D effort for both phases of this project, taking it from initial concept through to successful integration with the orbiting satellite. Key contributions included:
- Mathematical modelling — Developed models of the satellite-Earth-Sun system for predicting ground-site visibility and estimating image capture utility
- Algorithm development — Designed and implemented a modified Monte-Carlo Tree Search (MCTS) with heuristic-weighted action selection for efficient, any-time mission plan generation
- Simulation framework — Built a comprehensive digital twin for algorithm development and validation
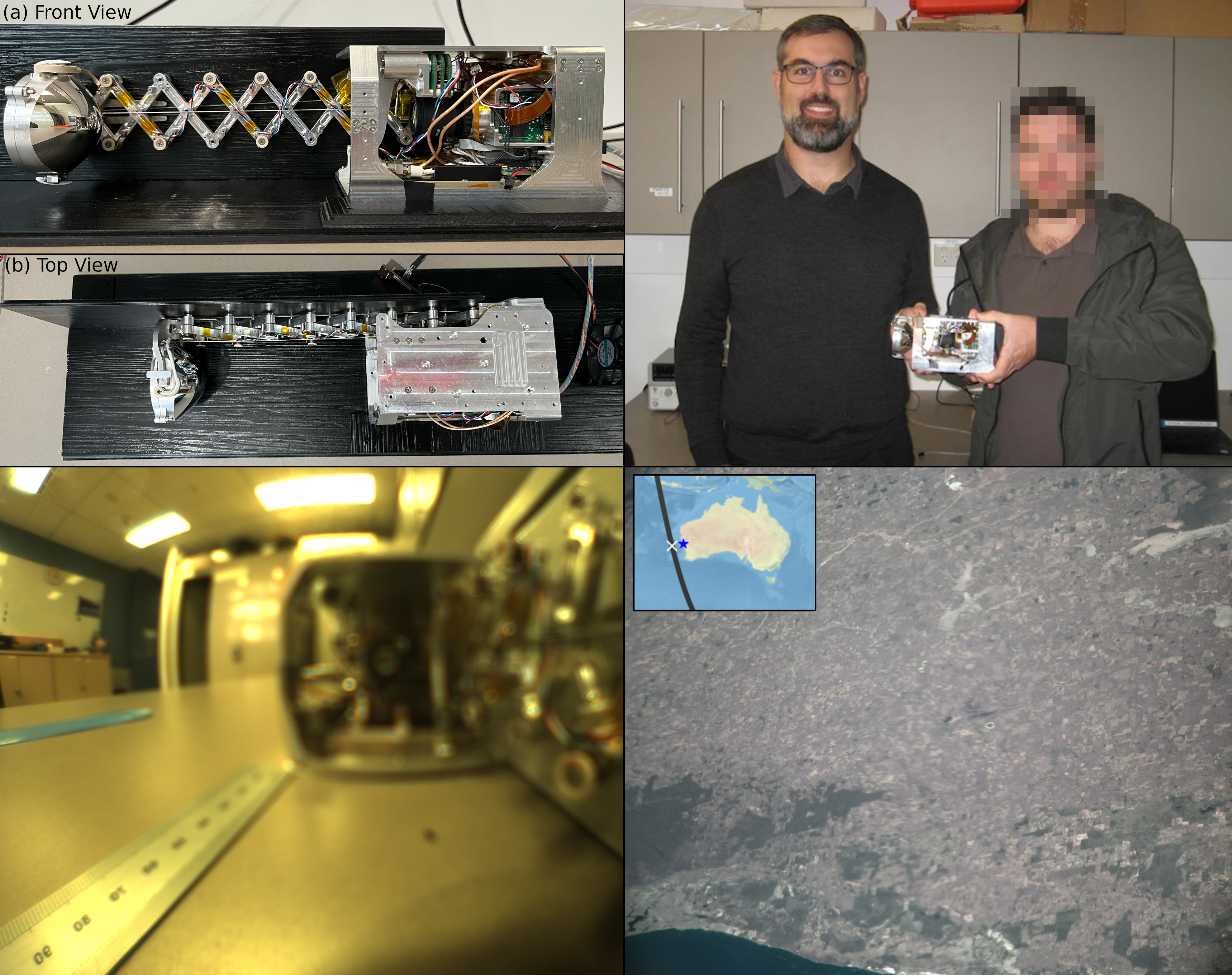
- System integration — Worked with DSTG to successfully integrate the mission planner with the MANTIS engineering model and the satellite engineering and flight models
- Stakeholder management — Liaised with DSTG and SmartSat for requirements capture, scope definition, technical roadmap development, and integration with the satellite and ground station systems.
Technical Approach
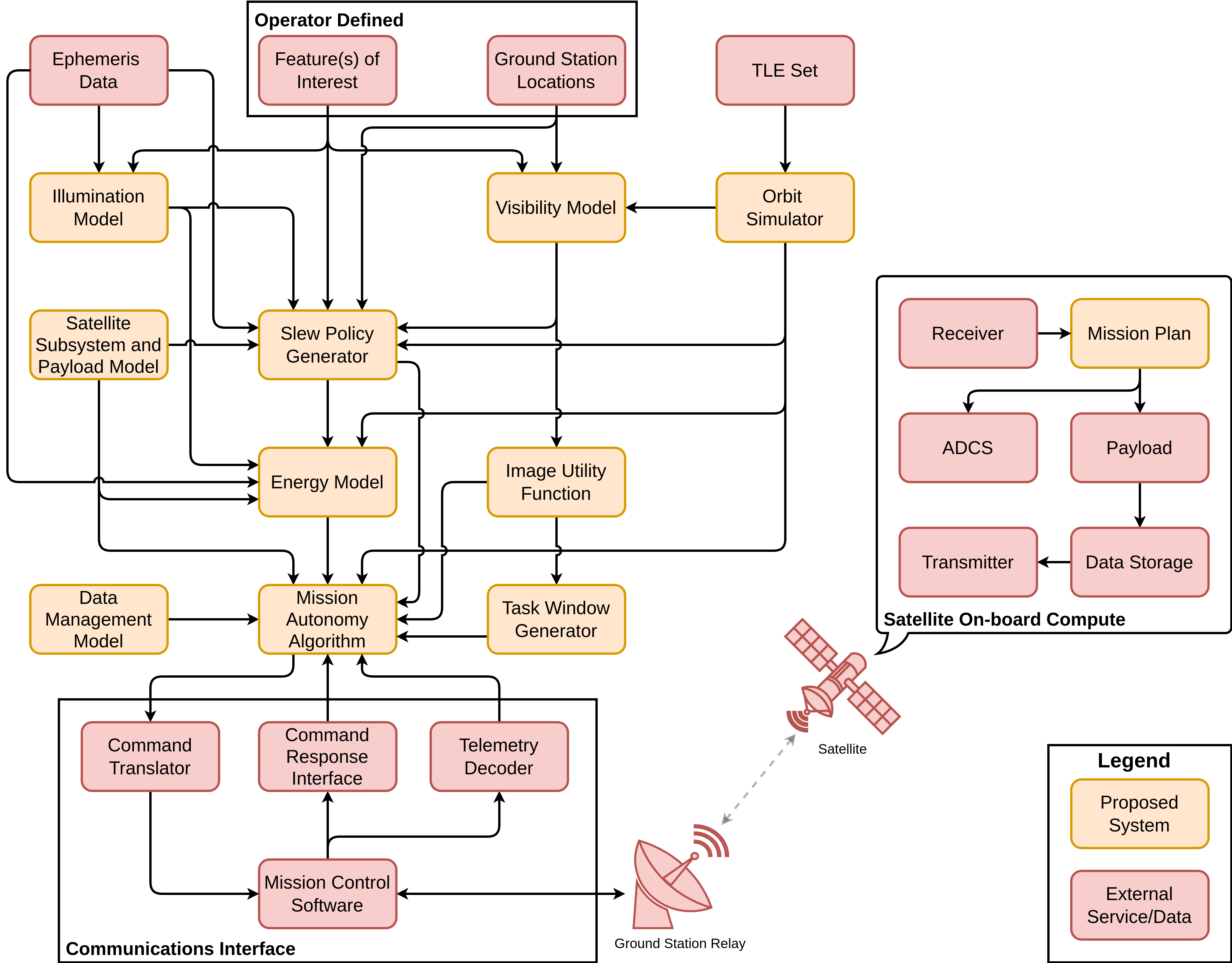
The mission autonomy system operates as a goal-oriented planner. Given high-level objectives (e.g., "image these ground sites" or "perform self-inspection"), it generates detailed action sequences that satisfy the satellite's operational constraints.
The core algorithm uses Monte-Carlo Tree Search, modified to handle the unique characteristics of satellite operations:
- Long planning horizons (multiple orbits)
- Continuous action spaces discretised into meaningful operations
- Hard constraints on power and data storage
The system predicts future states using orbital mechanics models and generates plans that can be executed autonomously.
Results & Impact
Phase 1 delivered a working mission planner, leveraging the mathematical modelling to generate efficient mission plans, and validating via numerical testing in simulation, demonstrating substantial performance improvements. This success led to securing $450k in funding for Phase 2, which focused on integration with the satellite flight model in Low-Earth orbit.
The work has been presented at two SmartSat-funded local conferences and two leading international space conferences (i-SAIRAS 2024 and IAC 2025). The algorithmic approaches developed have broader applications in resource-constrained autonomous systems beyond space.
Current Status
Phase 2 has successfully demonstrated integration with the Buccaneer Main Mission satellite currently in orbit. The mission planner is now part of the operational toolkit for the MANTIS payload, representing one of the first demonstrations of goal-oriented mission autonomy on an Australian cubesat.