Resource-Aware Agricultural Autonomy
Developing hierarchical planning frameworks that enable long-term autonomous operation of field robots in the presence of dynamic agents like people and livestock, while managing energy and operational constraints.
The Challenge
Agricultural environments present unique challenges for autonomous robots. Unlike controlled indoor settings, farm robots must operate for extended periods across large areas while sharing space with unpredictable agents—farm workers, livestock, and wildlife. They must also manage limited onboard energy while completing their monitoring or intervention tasks.
Existing approaches typically addressed navigation and task planning separately, without considering how dynamic agents respond to robot presence or how energy constraints affect long-term mission feasibility.
My Contribution
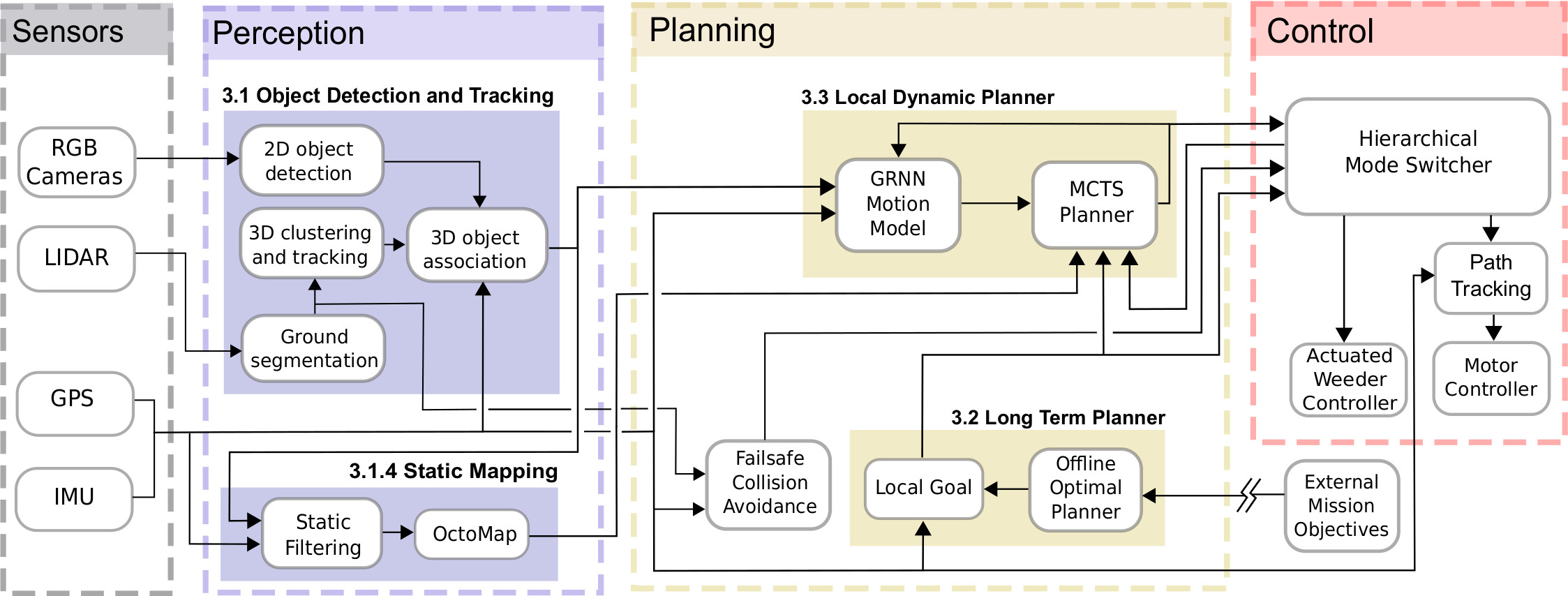
I collaborated closely with a fellow researcher to develop a hierarchical planning framework that integrates multiple levels of decision-making:
- Strategic planning — Long-term, offline objective-based planning that determines which areas to visit and in what order
- Slip-minimising estimation and control — Esimate and minimise impact of environmental slip to reduce energy consumption and improve localisation accuracy.
I specifically contributed my PhD work on resource-aware planning and off-road trajectory tracking control, integrating these with the dynamic path planner to achieve safe, efficient autonomous operation.
Technical Approach
The framework addresses three key challenges simultaneously:
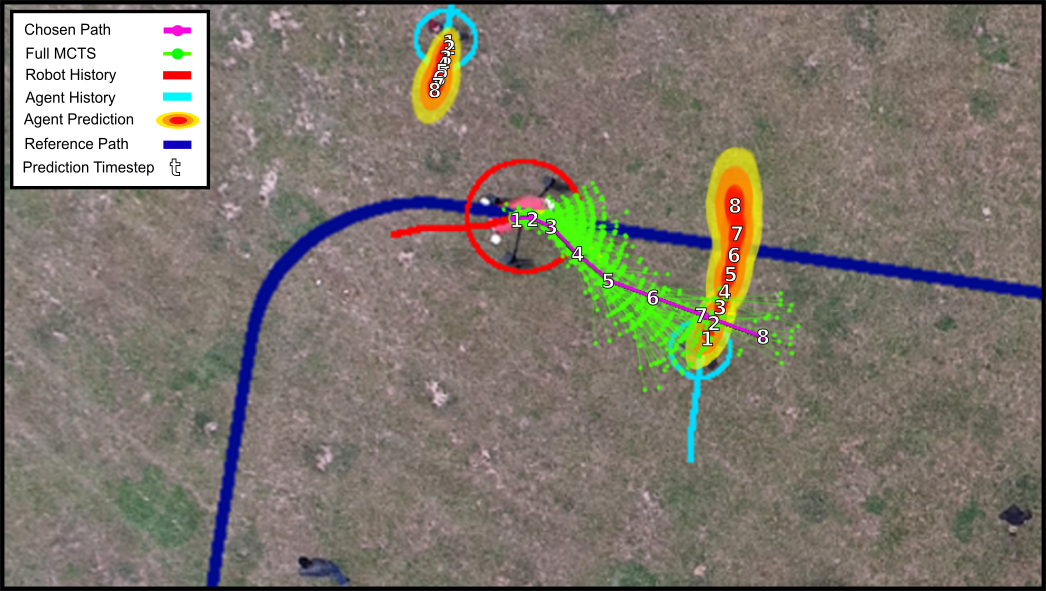
- Response-aware navigation — Modelling how livestock and people respond to robot motion, and planning paths that minimise disturbance while achieving objectives
- Energy-aware planning — Using terrain-dependent energy cost models to plan missions that respect battery constraints
- Hierarchical integration — Seamlessly connecting high-level task planning with low-level motion control
The system uses receding-horizon optimisation at multiple timescales, allowing it to commit to near-term actions while remaining flexible about longer-term plans as new information becomes available.
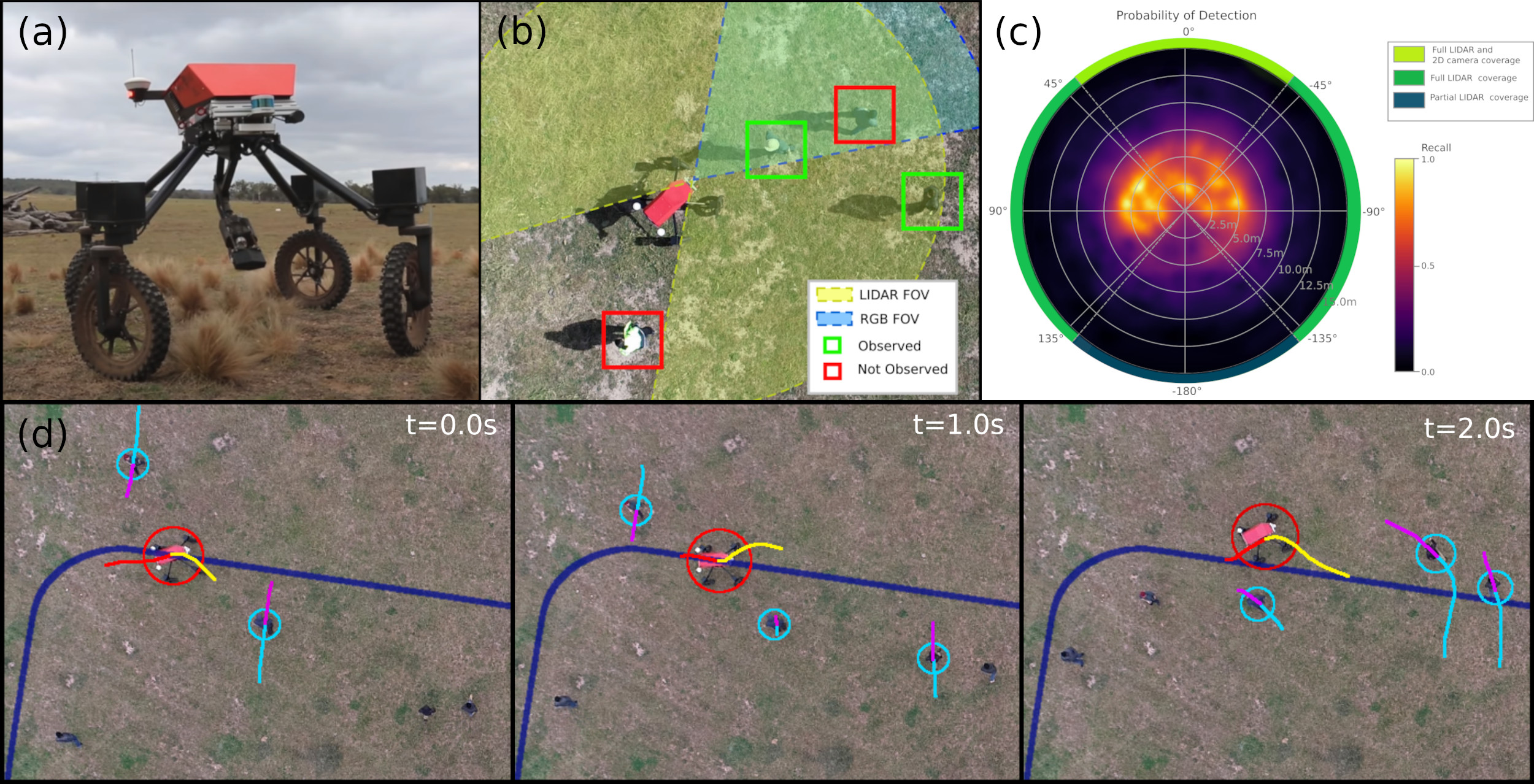
Field Validation
We demonstrated the system through extensive field trials on a university-owned farm, operating the robot autonomously in paddocks with grazing cattle and occasional human presence. The trials validated that the system could:
- Complete monitoring missions while avoiding close encounters with people or livestock
- Dynamically replan when agents moved unexpectedly
- Accurately manage energy consumption across varied terrain
- Operate for extended periods without human intervention
Results & Impact
This work resulted in a publication in IEEE Transactions on Field Robotics, and two conference publications. The framework has influenced subsequent agricultural robotics projects at ACFR and provides a foundation for safe human-robot coexistence in unstructured environments.
The algorithms developed have applications beyond agriculture—any domain where robots must operate autonomously around dynamic agents while managing resource constraints can benefit from this hierarchical approach.